

Υπερίων/Hyperion Περίληψη/Summary Blog Παραδοτέα/Deliverables Επικοινωνία/Contact
Blog
Project start
Project started
Written by: Super User
Published: 01 June 2020
Kickoff meeting
The first meeting of the project took place on May 2nd 2020.
The meeting was held via video conference due to the COVID-19 pandemic. Technical and administration issues of the project were discussed during the meeting.
Written by: Super User
Published: 02 June 2020
Project teleconference
The second meeting of the project took place via video conference on May 29 2020.
Technical and administration issues of the project were discussed.
Written by: Super User
Published: 29 June 2020
Project specifications delivered
Deliverable D1.1 (project requirements and technical specifications) was delivered on M4 (Sep 2020).
Written by: Super User
Published: 30 September 2020
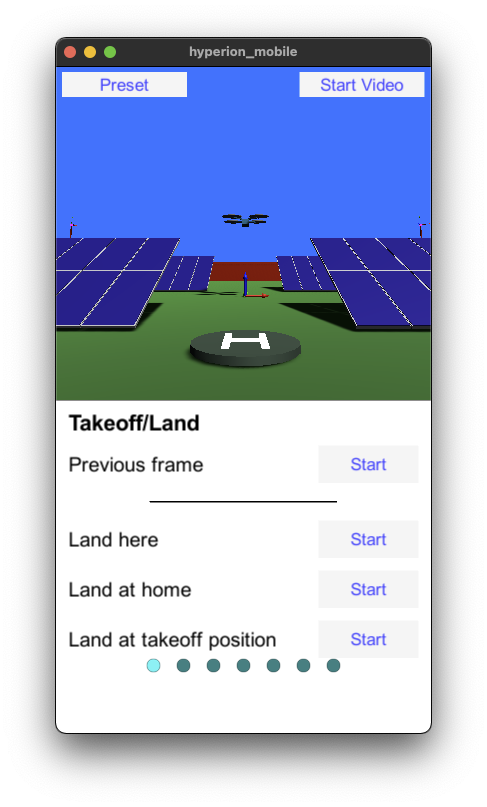
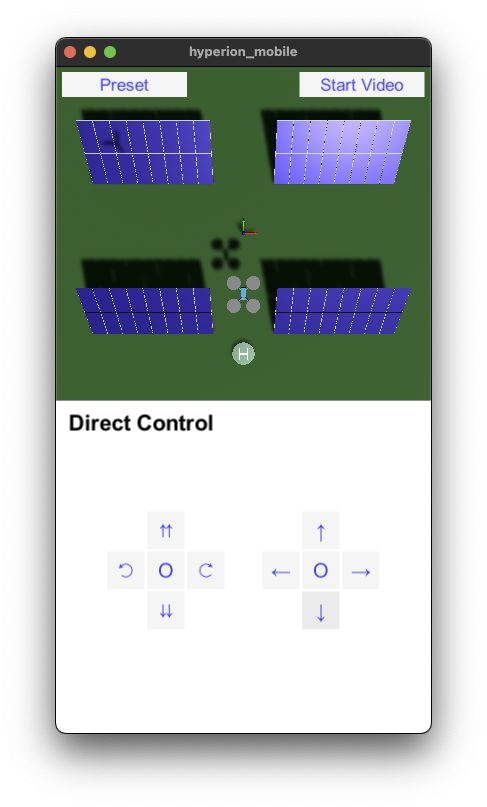
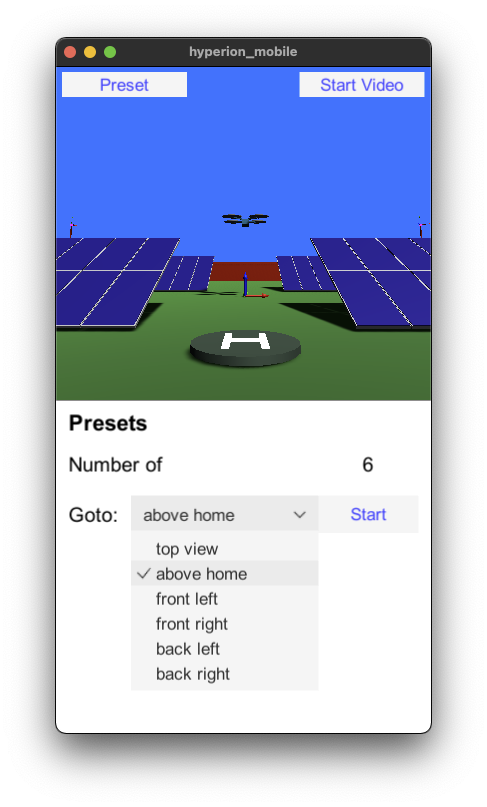
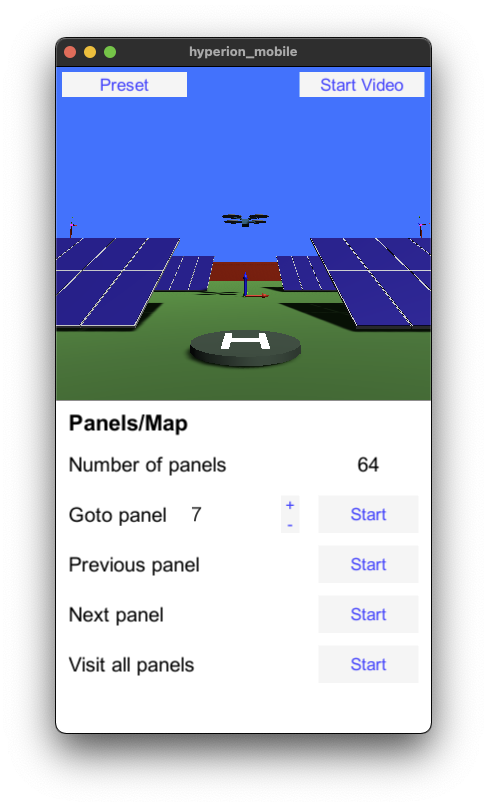
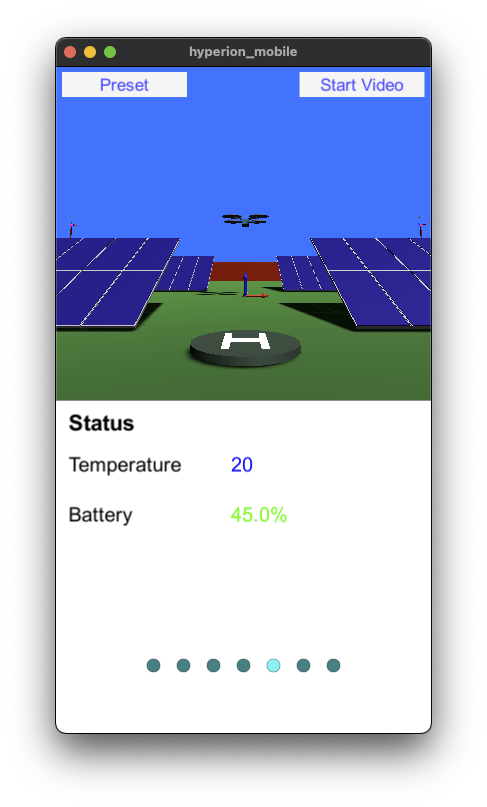
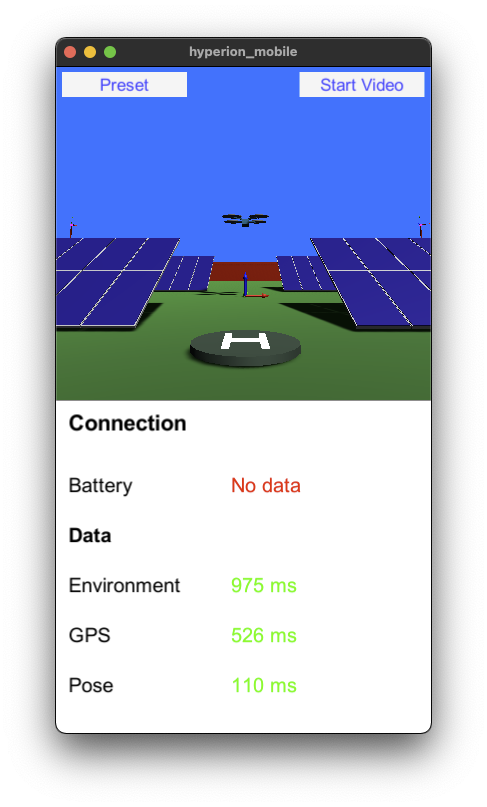
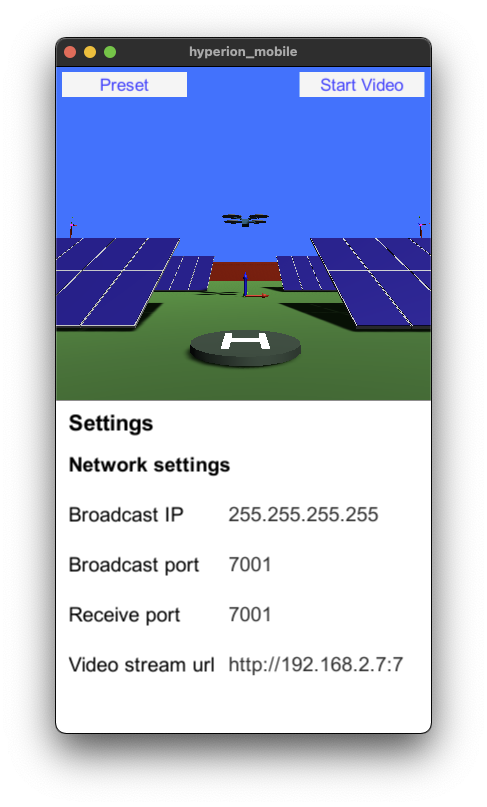
Mobile interface - first version
The first version of HYPERION's mobile interface is ready and has been distributed to partners for experimentation. For now, the mobile interface communicates with the drone via a simple UDP-based protocol.
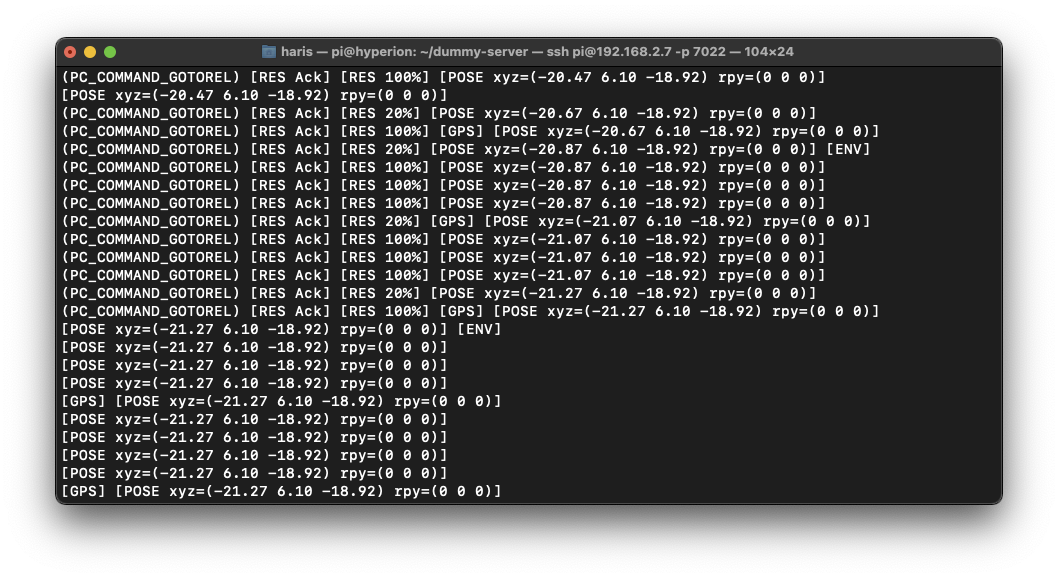
To test communications between the mobile interface and the drone, a dummy server has also been created which implements the communications protocol and gives dummy responces to interface commands.
 |
 |
 |
| (a) | (b) | (c) |
 |
 |
 |
| (d) | (e) | (f) |
 |
 |
|
| (g) | (h) | |
(a-g) Screenshots of HYPERION's mobile interface, (h) Dummy server used to test communications between the interface and the drone.
Written by: Super User
Published: 01 October 2020
Usage scenarios and validation guide delivered
Deliverable D4.1 (usage scenarios and validation guide) was delivered on M6 (Nov 2020).
Written by: Super User
Published: 30 November 2020
First progress report delivered
The first 6-monthly project report was delivered on M6 (Nov 2020).
Written by: Super User
Published: 30 November 2020
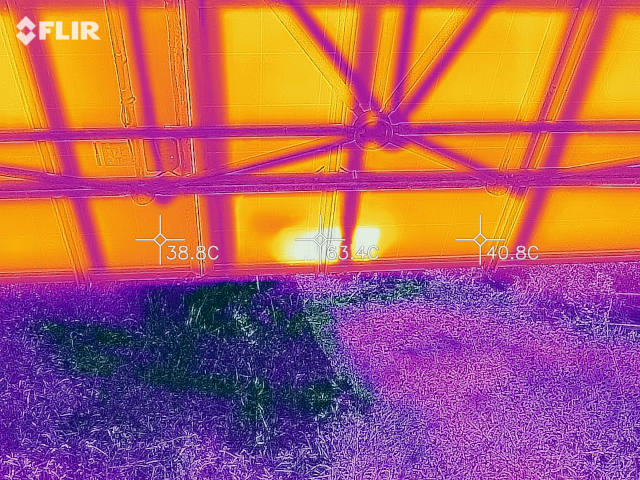
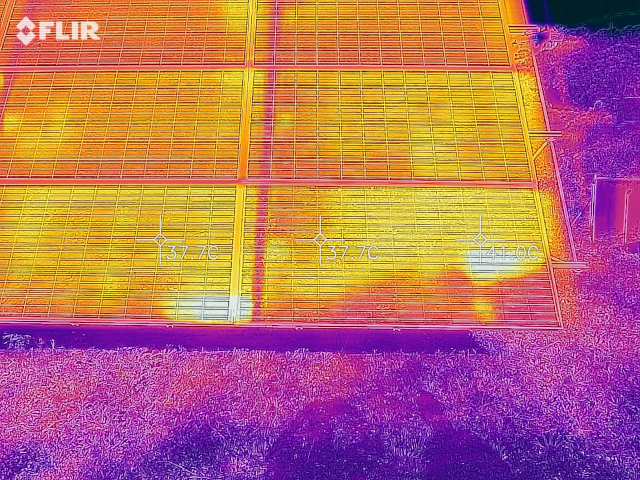
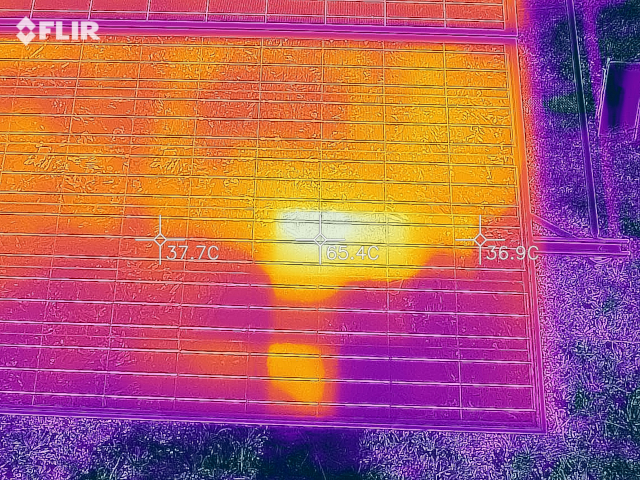
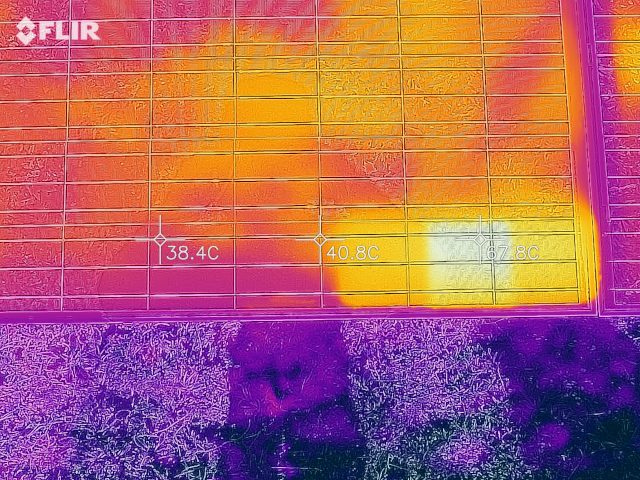
Thermal examination of photovoltaic panels
All photovoltaic plants where examined with the use of a thermal camera in order to manually identify panels with hotsports and other problems.
Indicative color-coded thermal images of photovoltaic panels with hotspots are shown in the following photos. Yellow colored areas are areas with higher temperatures.
 |
 |
| (a) | (b) |
 |
 |
| (c) | (d) |
(a-d) Color coded thermal images of photovoltaic panels. Yellow colored areas are areas with higher temperatures.
Written by: Super User
Published: 01 December 2020
Flight Tests
First flight tests with off-the-shelf platform Matrice 600 pro.
Written by: Super User
Published: 15 December 2020
Project teleconference
The fourth meeting of the project took place via video conference on January 28th, 2021.
Written by: Super User
Published: 28 January 2021
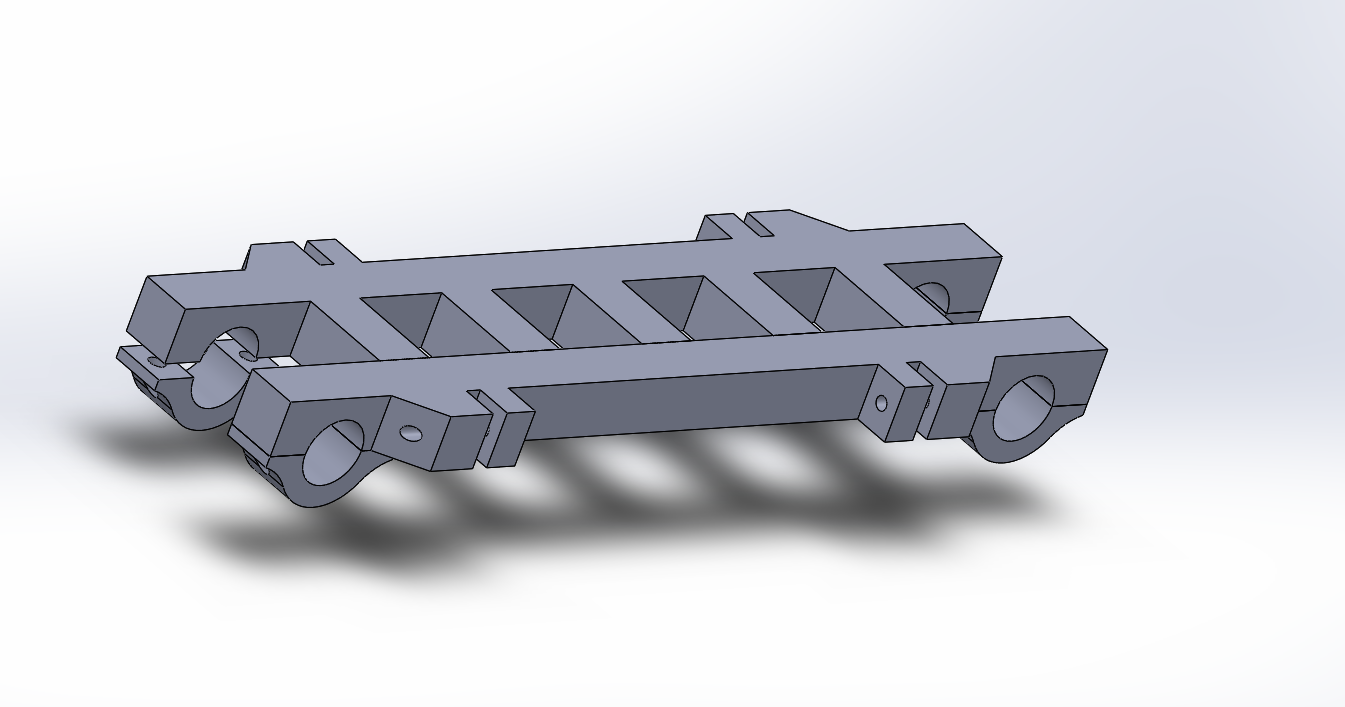
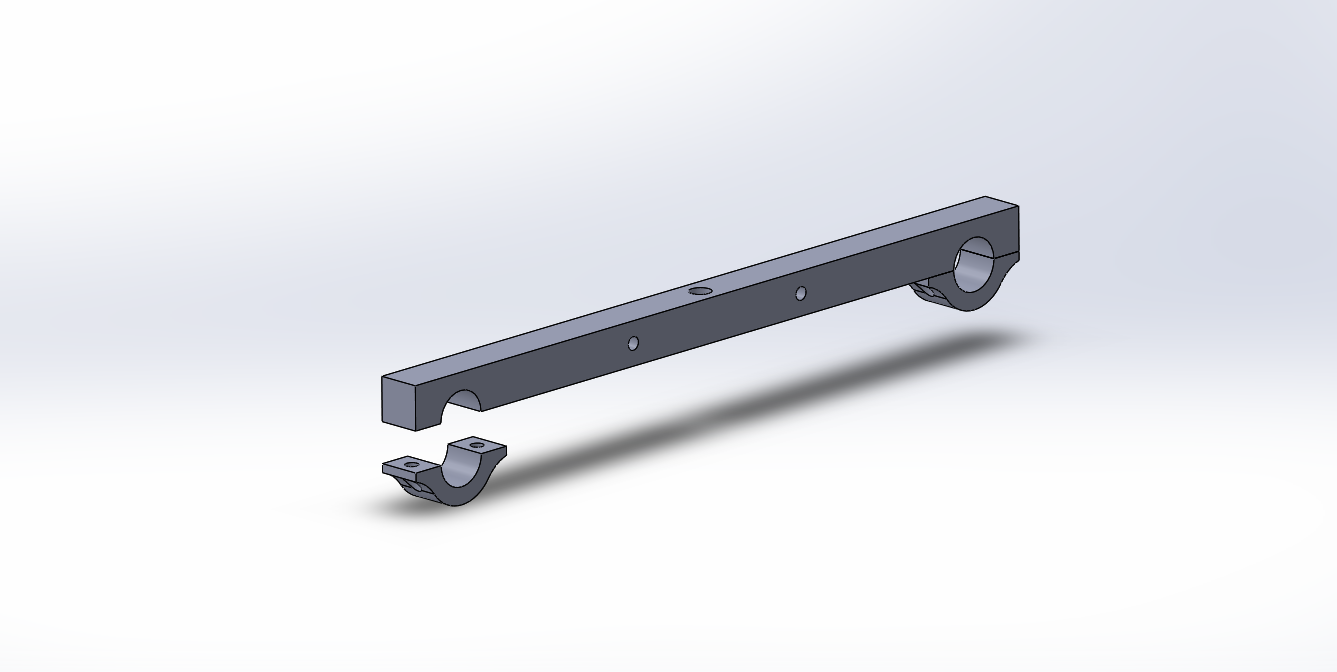
Test of cameras and mounting options
February 2021. A variety of camera and sensor setups and custom mounting options were tested.
Custom mounting options for one or more cameras:
 |
 |
Written by: Super User
Published: 01 February 2021
Project teleconference
The fifth meeting of the project took place via video conference on April 2nd, 2021.
Written by: Super User
Published: 02 April 2021
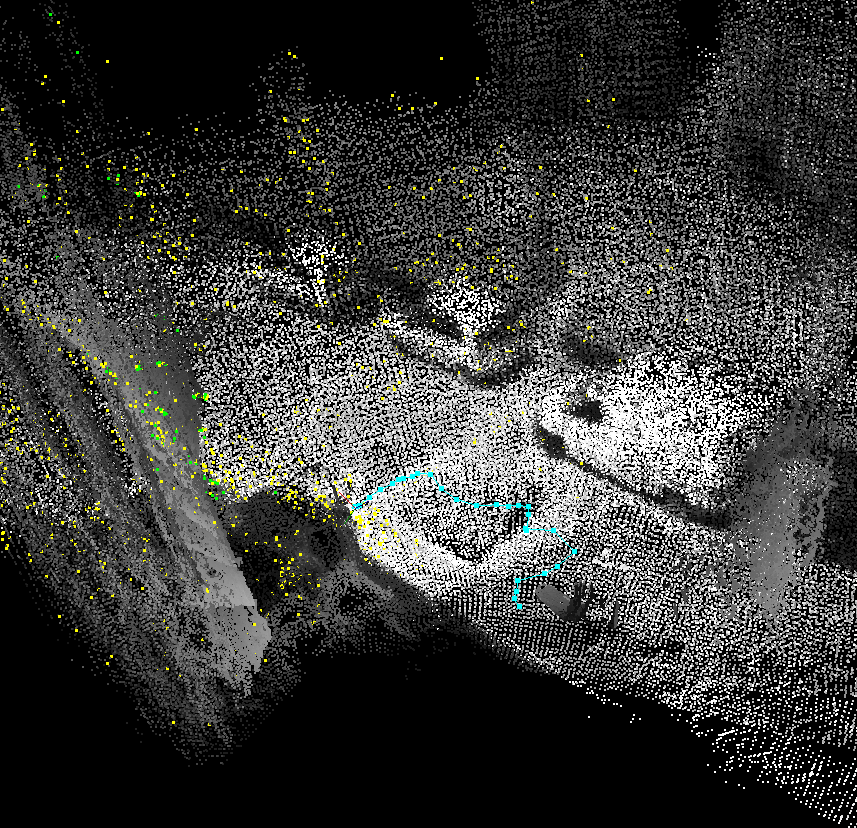
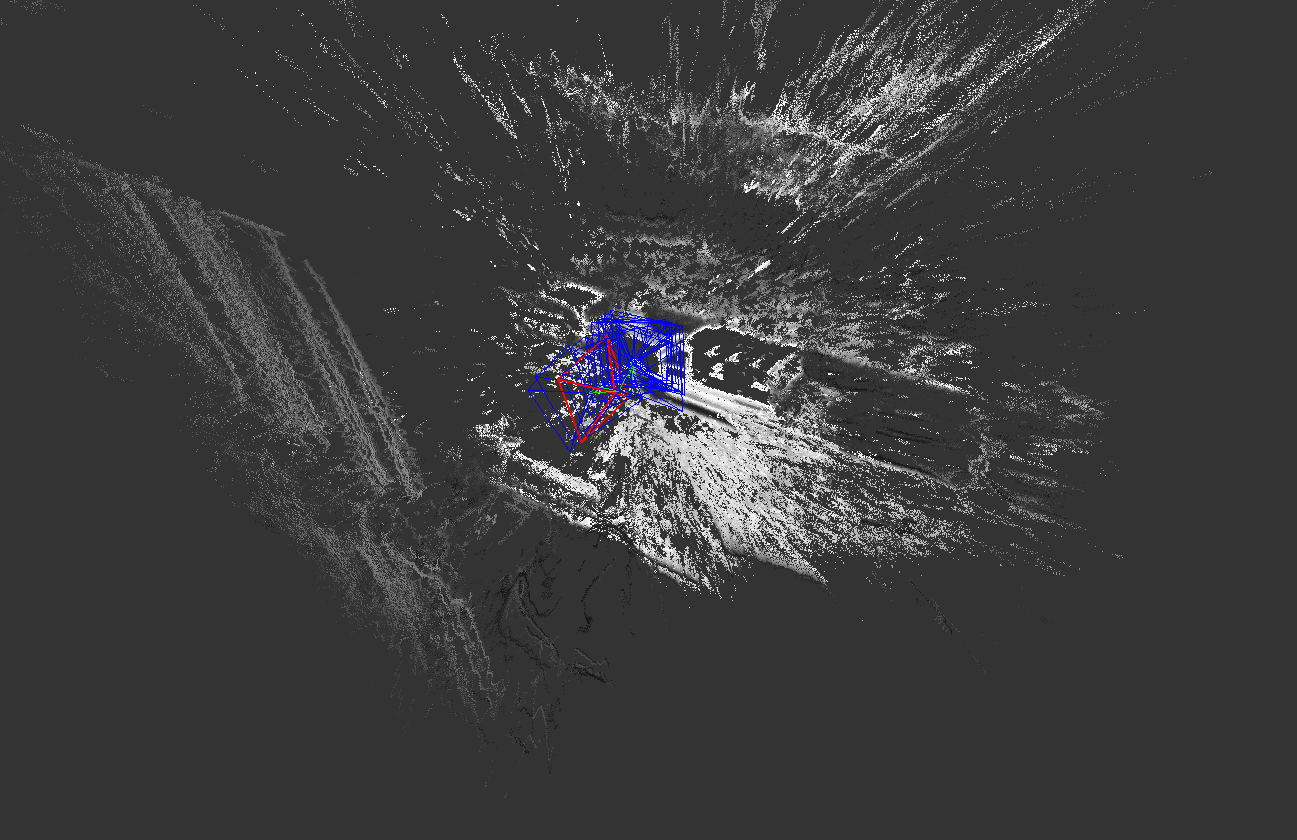
Simultaneous Localisation and Mapping tests
Extensive tests of vision based SLAM were conducted at the premises of FORTH. Different algorithm versions and sensor setups were tried.
 |
 |
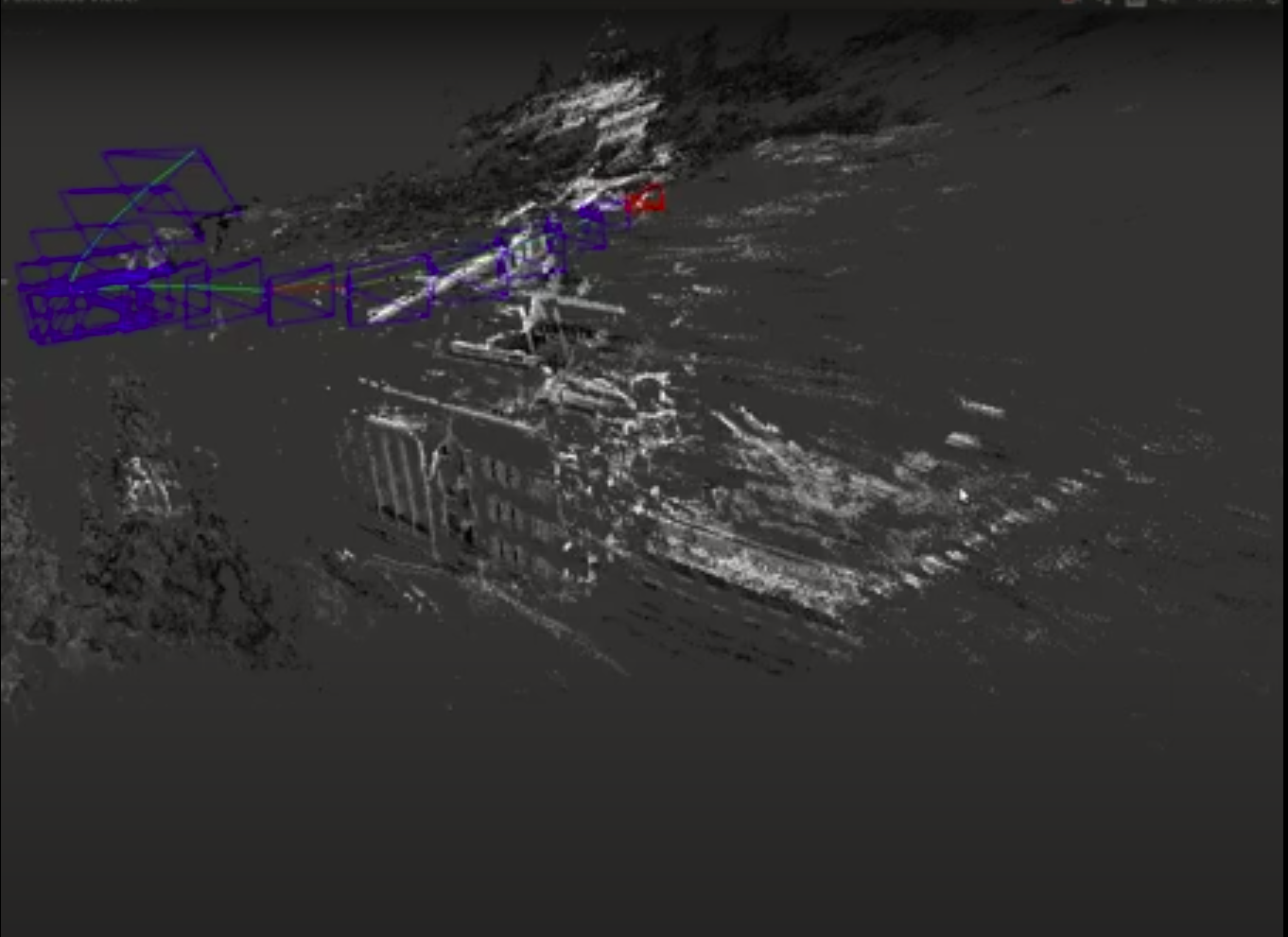 |
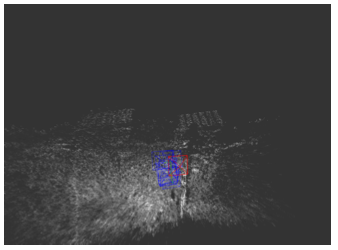 |
Written by: Super User
Published: 15 April 2021
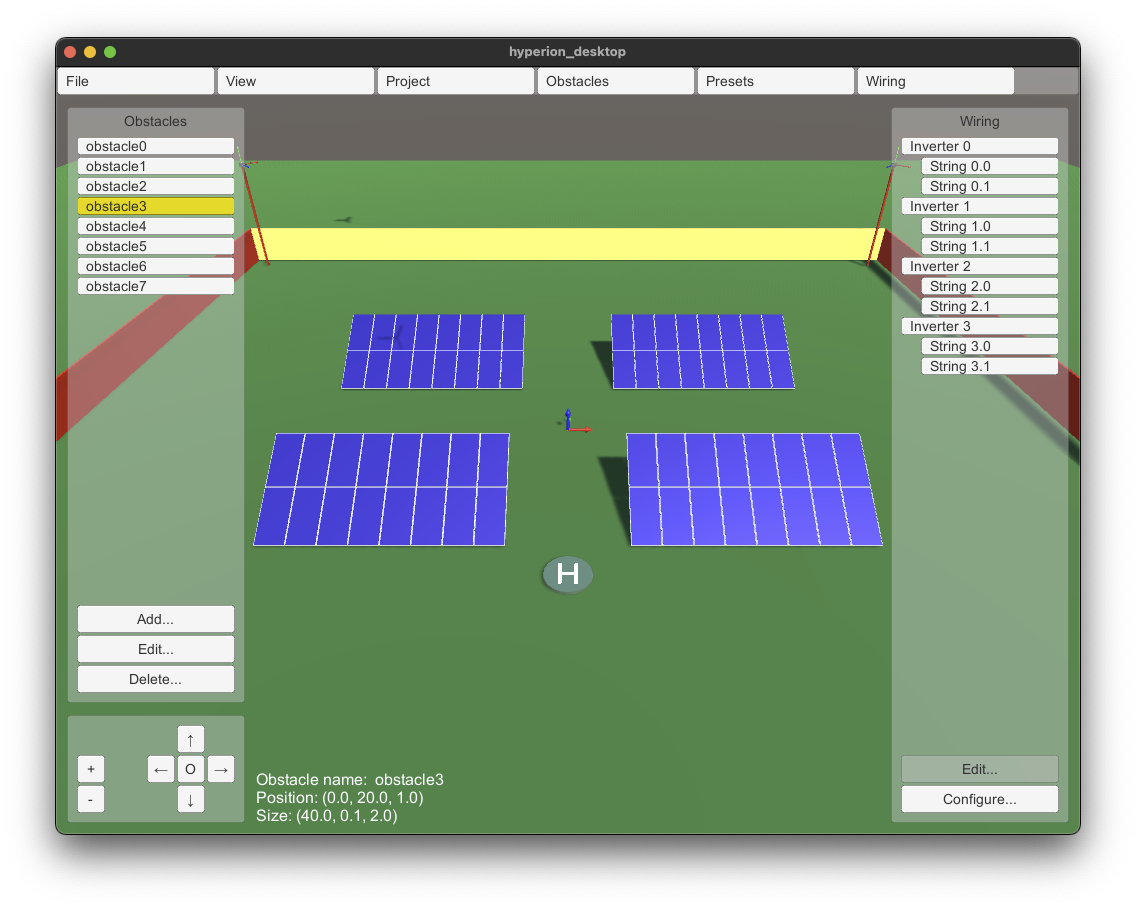
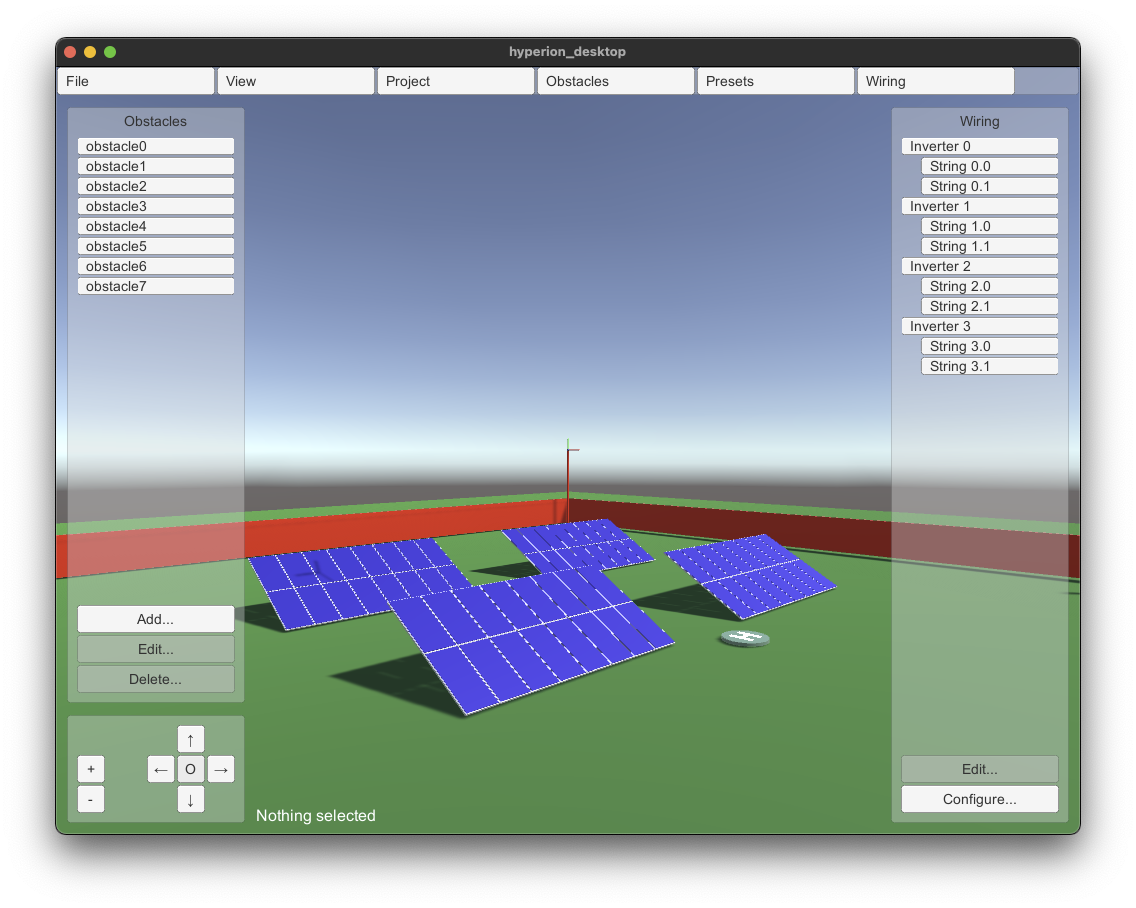
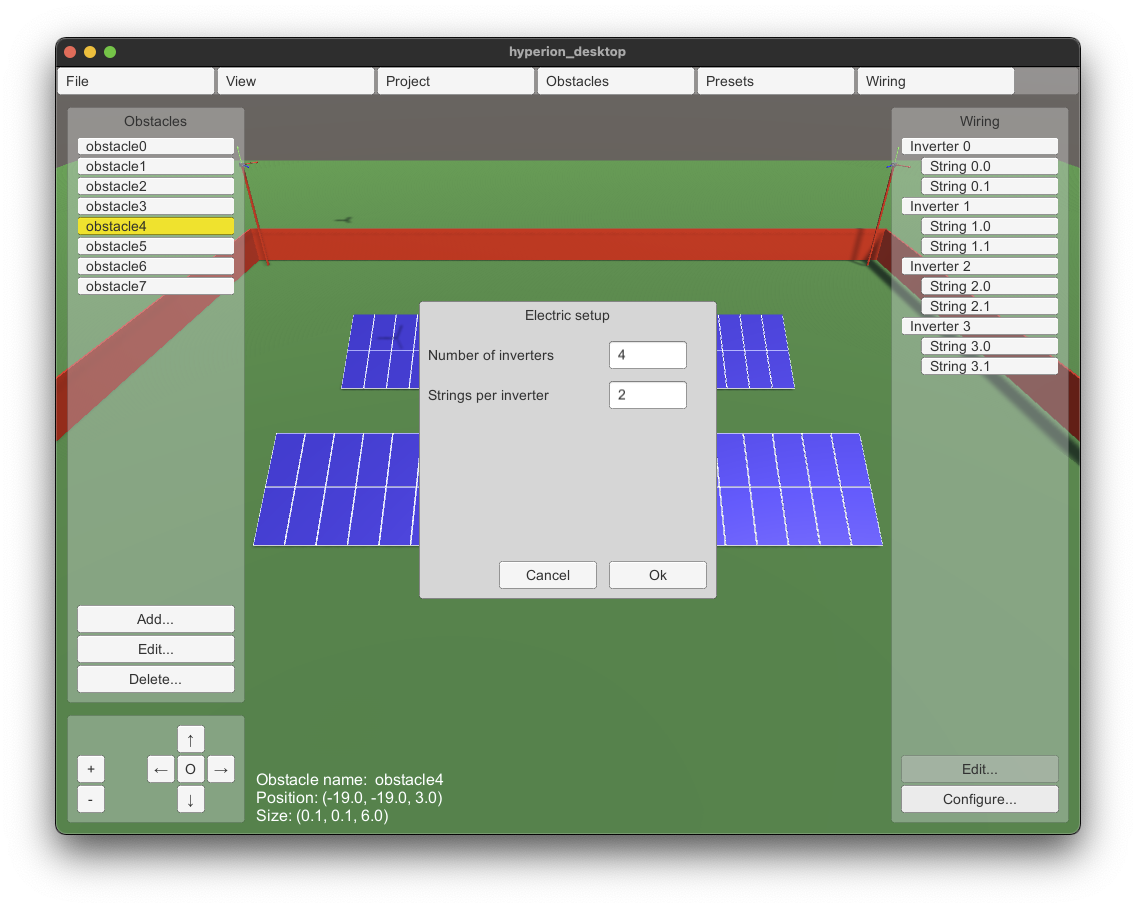
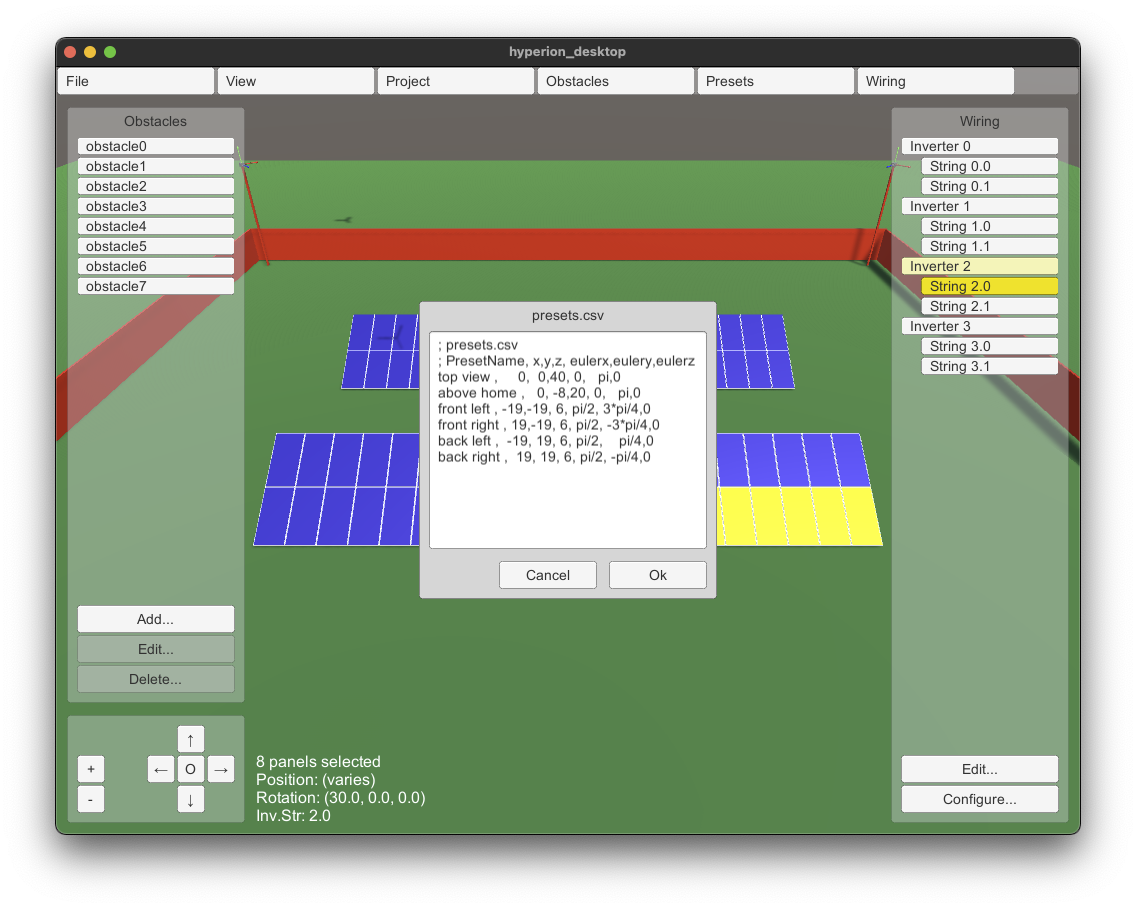
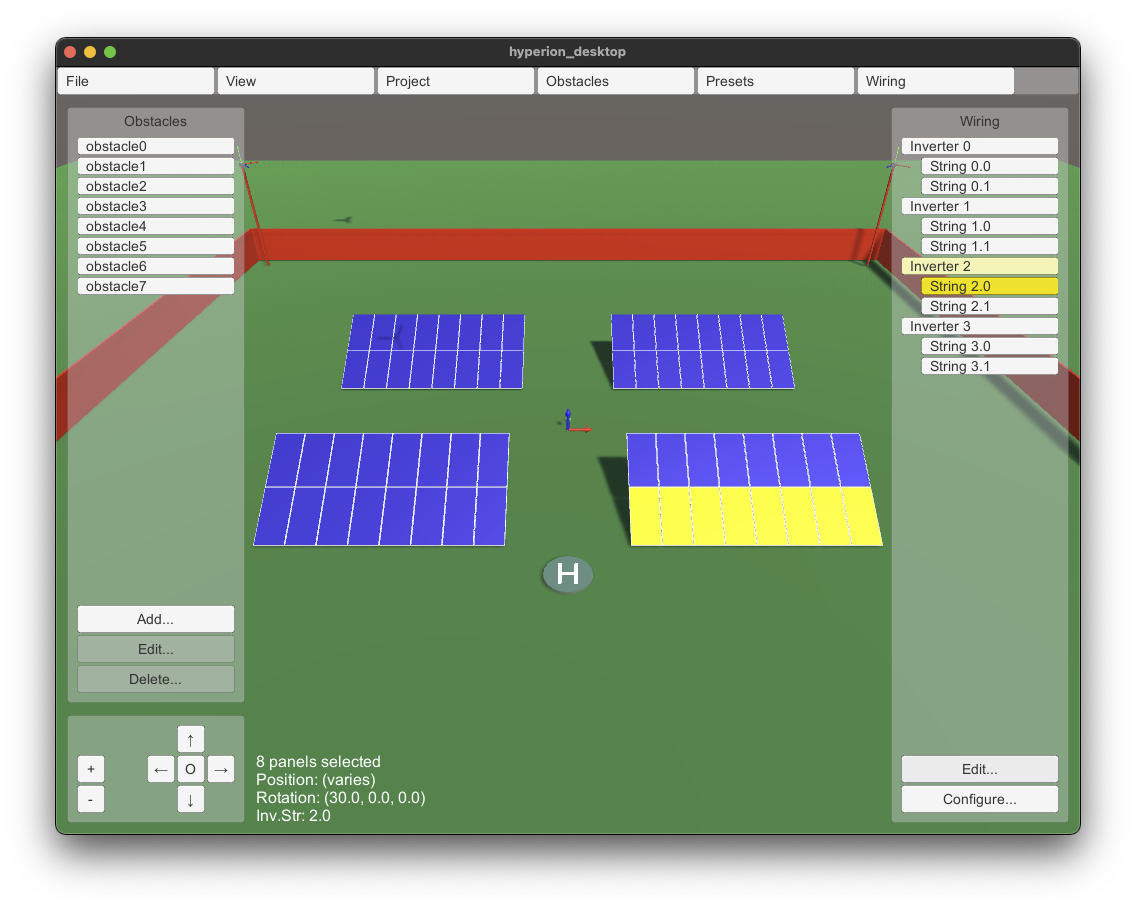
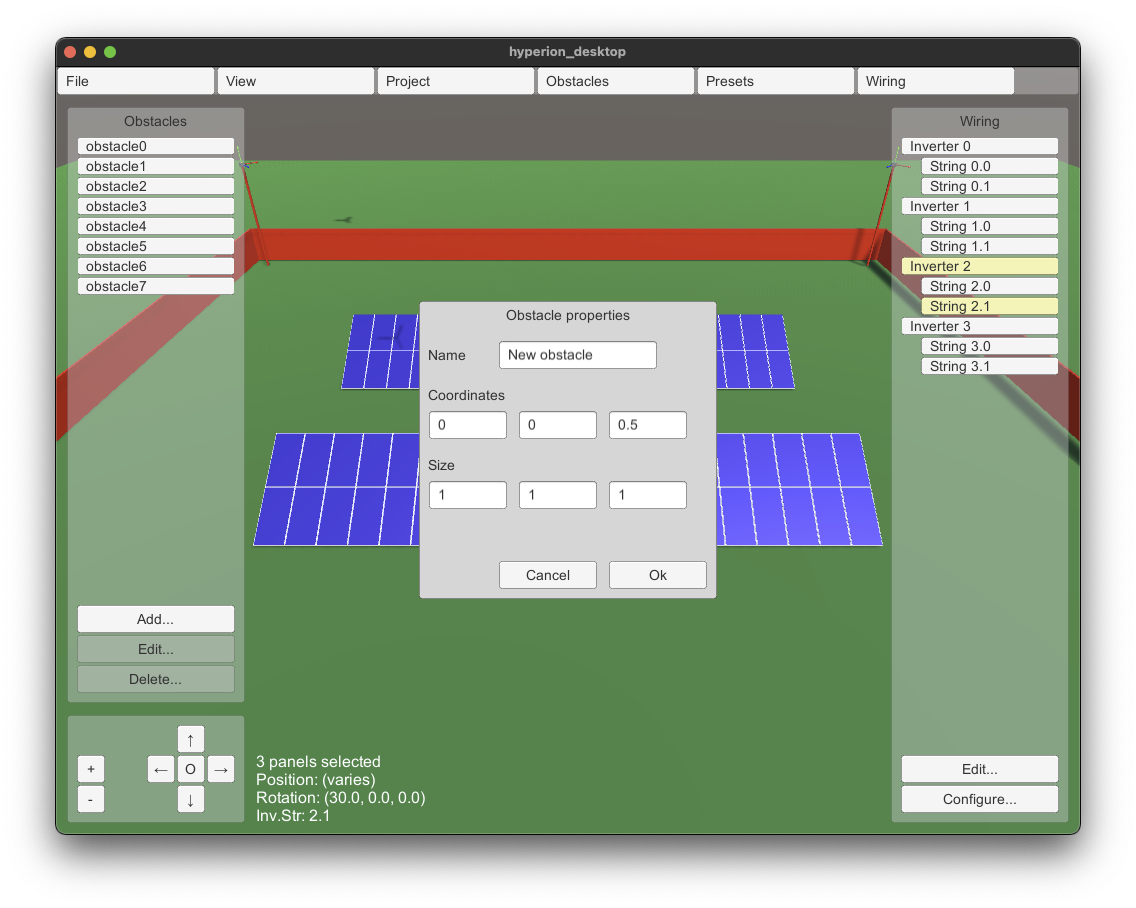
Desktop interface - first version
The first version of HYPERION's desktop interface has been delivered by Pygolampis and distributed to the other partners for experimentation. The current version allows entry of the photovoltaic plant's electrical circuity (e.g. which panel belongs to which inverter and which string). Ir also allows the definition of "obstacles" (dangerous areas for the robot to avoid) and the definition of preset drone poses.
The images bellow showcase some of the functionality of the current version of the desktop interface.
 |
 |
| (a) | (b) |
 |
 |
| (c) | (d) |
 |
 |
| (e) | (f) |
Screenshots from HYPERION's desktop interface. (a,b) The photovoltaic plant can be observed from different preset camera locations, (c) general electrical charakteristics of the plant, (d) preset drone poses, (e) selecting panels belonging to the same inverter but different strings, (f) obstacle locations snd properties.
Written by: Super User
Published: 01 May 2021
Testing HYPERION's control modules
During the first days of May 2021, extensive flight tests were conducted in order to test the control modules of the aerial vehicle. An off-the-shelf platform was used for the iitial tests.
Platform used for initial tests of HYPERION's control modules:
 |
 |
Written by: Super User
Published: 10 May 2021
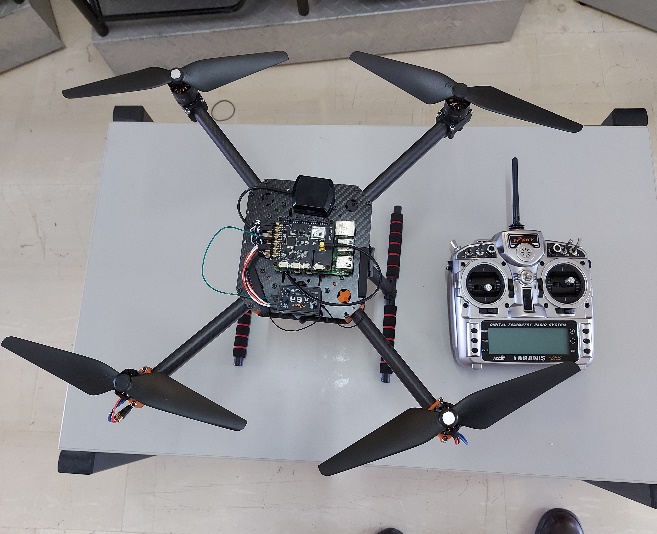
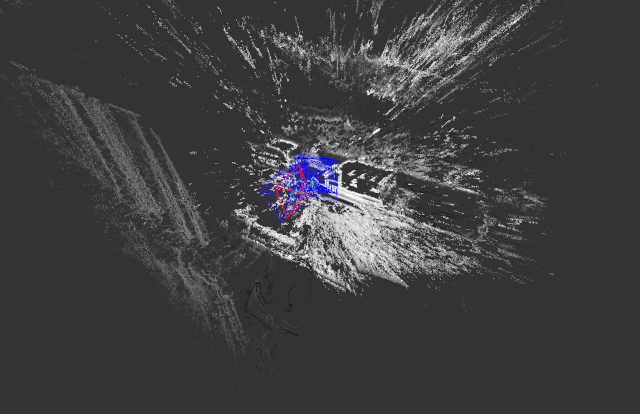
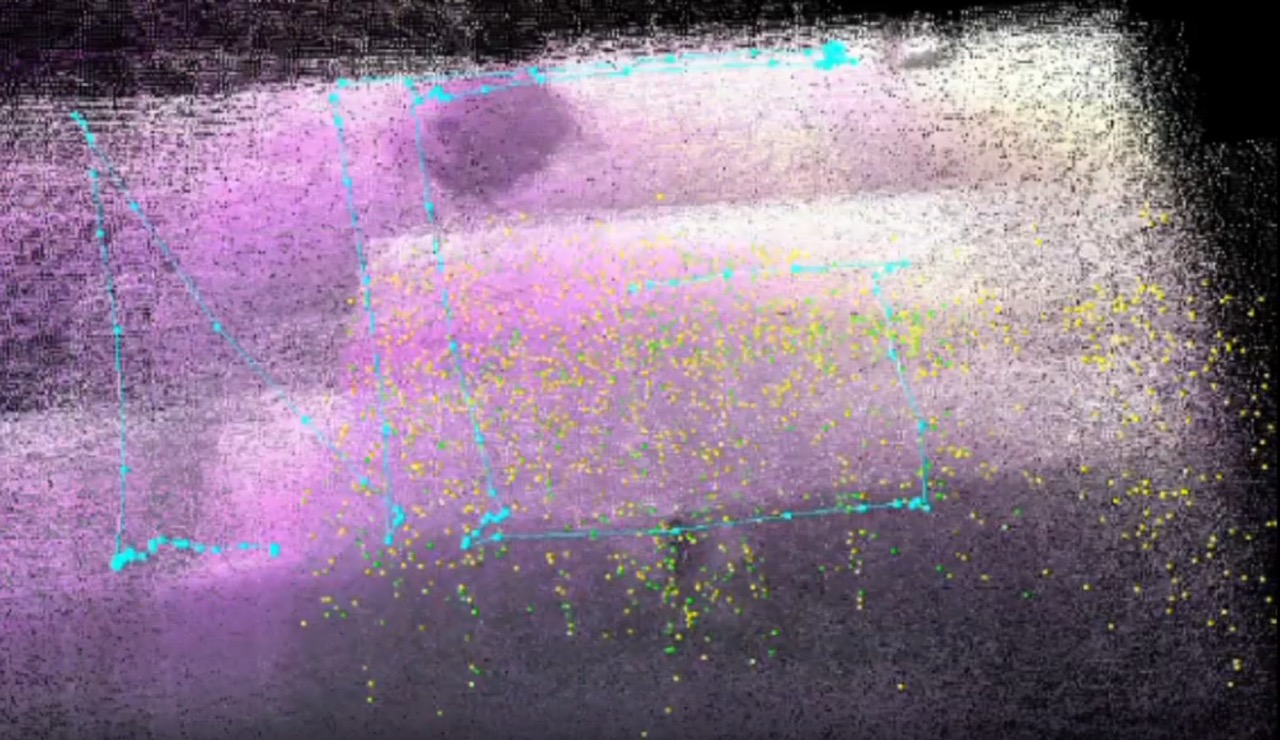
Mapping algorithm experiments
Initial tests of the localization and mapping algorithms were curried out in two photovoltaic plants. Data were gathered using an off-the-shelf drone equipped with two embedded PCs for online computation and a variety of sterescopic camera setups.
Indicative results are shown in the pictures bellow. More information will be provided in deliverable D3.1 (Mapping and localization)
 |
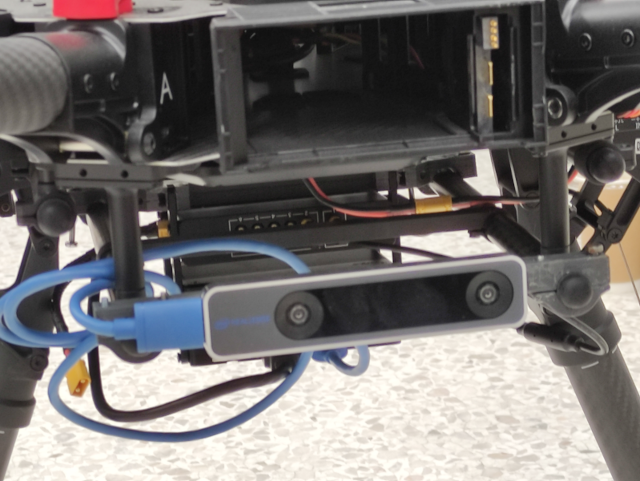 |
| Drone used for the experiments | Hardware setup |
 |
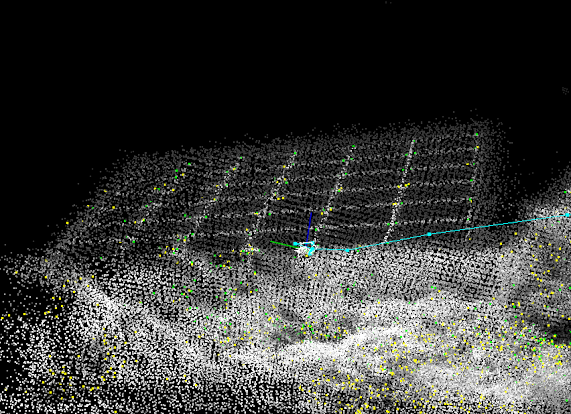 |
| Sample map | Sample map |
Written by: Super User
Published: 15 May 2021
Second progress report delivered
The second 6-monthly project report was delivered on M12 (May 2021)
Written by: Super User
Published: 31 May 2021
Integration plan ready
D4.2 (Integration plan) was delivered on M12 (May 2021)
Written by: Super User
Published: 31 May 2021
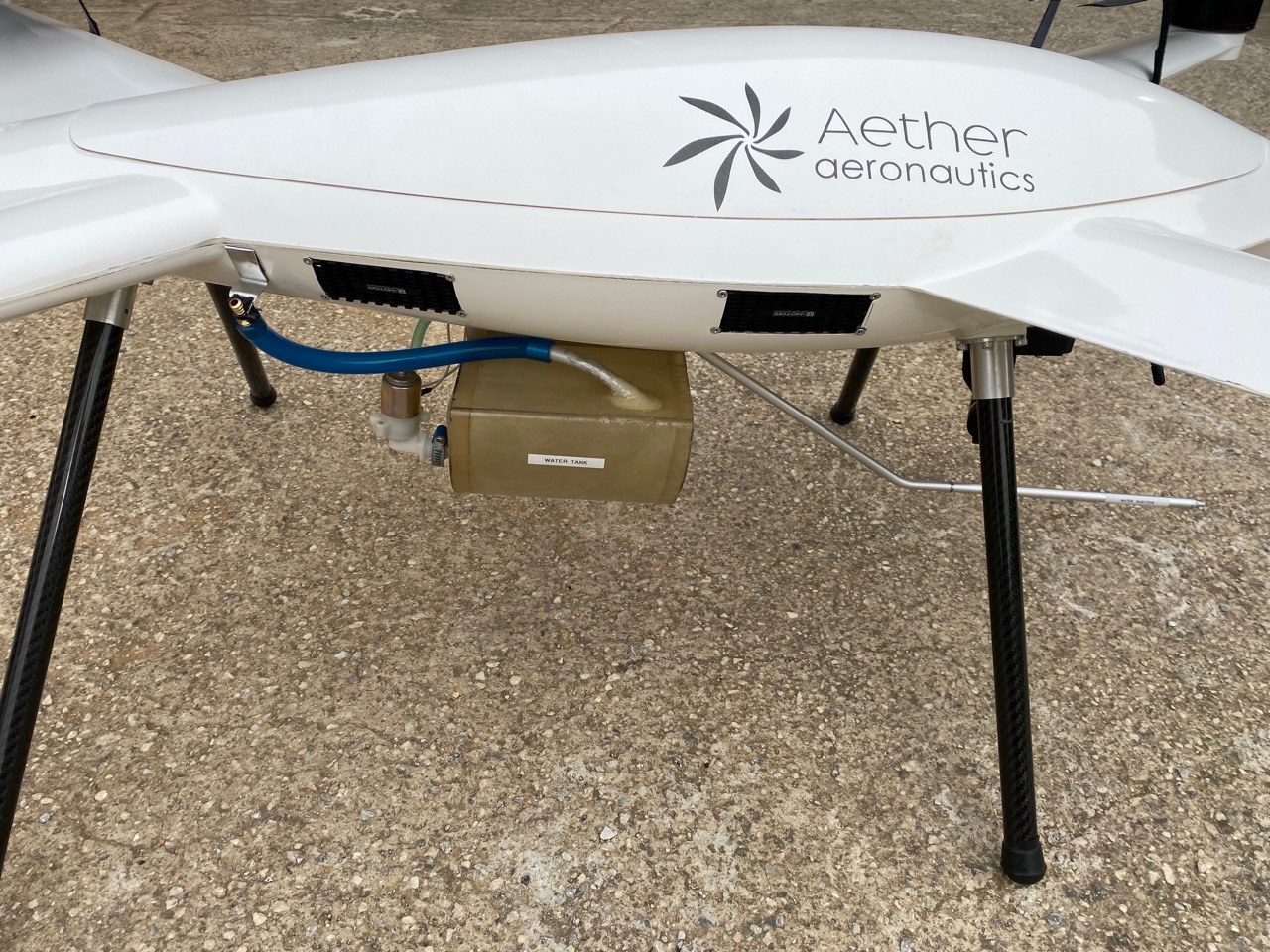
Hyperion drone by Aether Aeronautics, ready for tests
D2.1 (Flying robotic platform according to the specificatios) was delivered by Aether Aeronautics on M12 (May 2021)
 |
|
 |
 |
Written by: Super User
Published: 31 May 2021
Drone mapping and localisation delivered
D3.1 (Mapping and localization) was delivered on M12 (May 2021)
Written by: Super User
Published: 31 May 2021
Flight tests of the HYPERION platform
On June 9th and 10th, ,extensive flight tests of the actual HYPERION platform were conducted.
 |
 |
Written by: Super User
Published: 10 June 2021
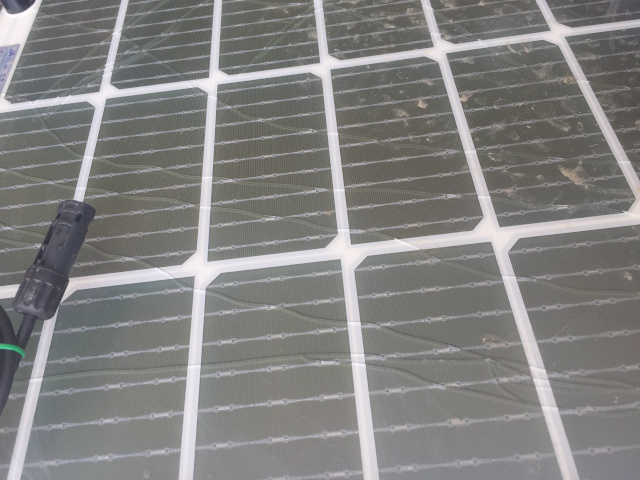
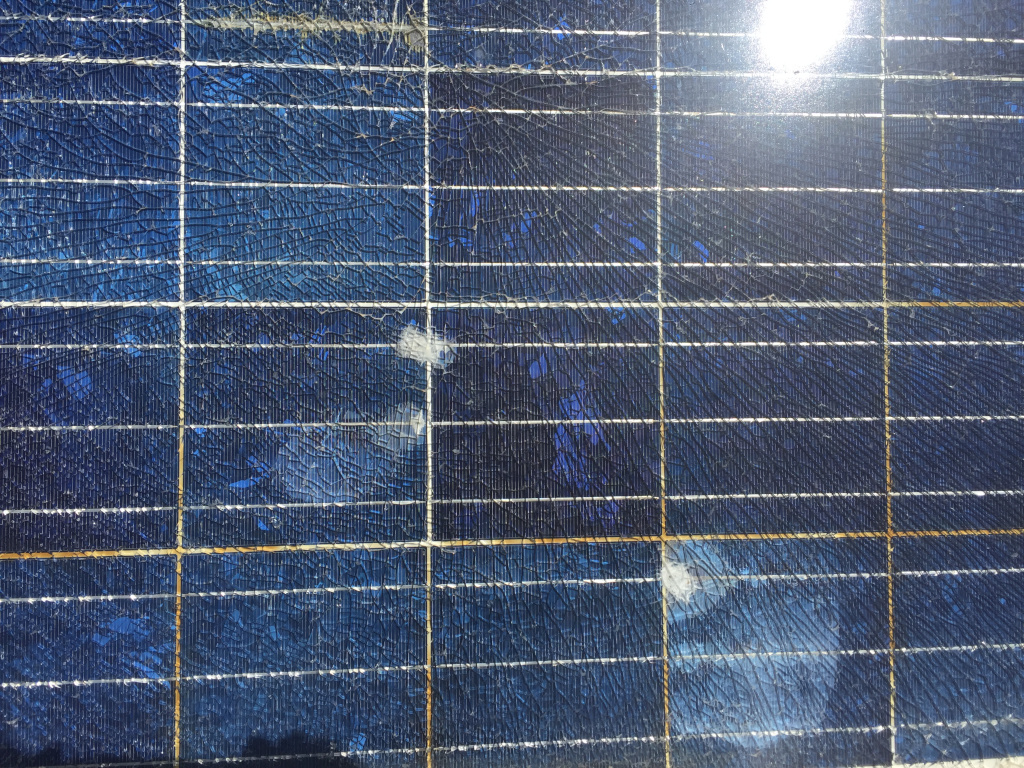
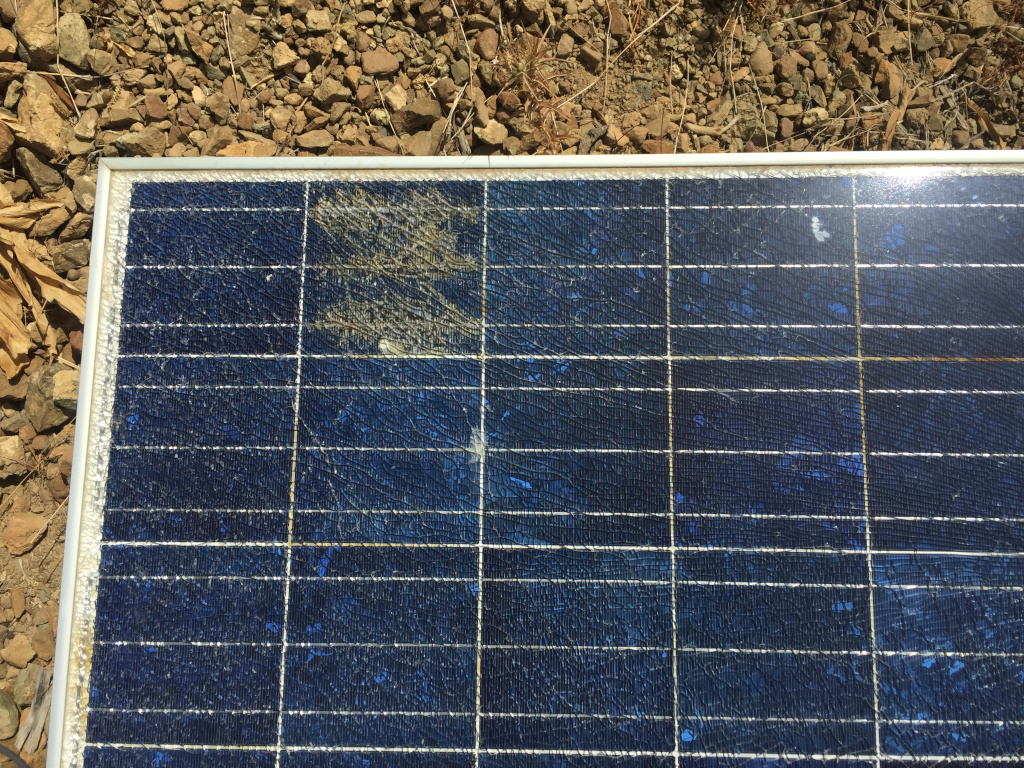
Identification of faulty panels
Faulty panels with representative faults have been identified and collected for further testing and experimentation.
 |
 |
| (a) | (b) |
 |
 |
| (c) | (d) |
 |
 |
| (e) | (f) |
 |
 |
| (g) | (h) |
(a) Faulty panels have been isolated and gathered for further tesing and experiments, (b) cracks on the protective glass coating, (c) delamination (d) yellowing of tha back sheet, (e,f) damaged panels due to hotspots, (g,h)damaged panels due to hotsports (back side).
Written by: Super User
Published: 15 June 2021
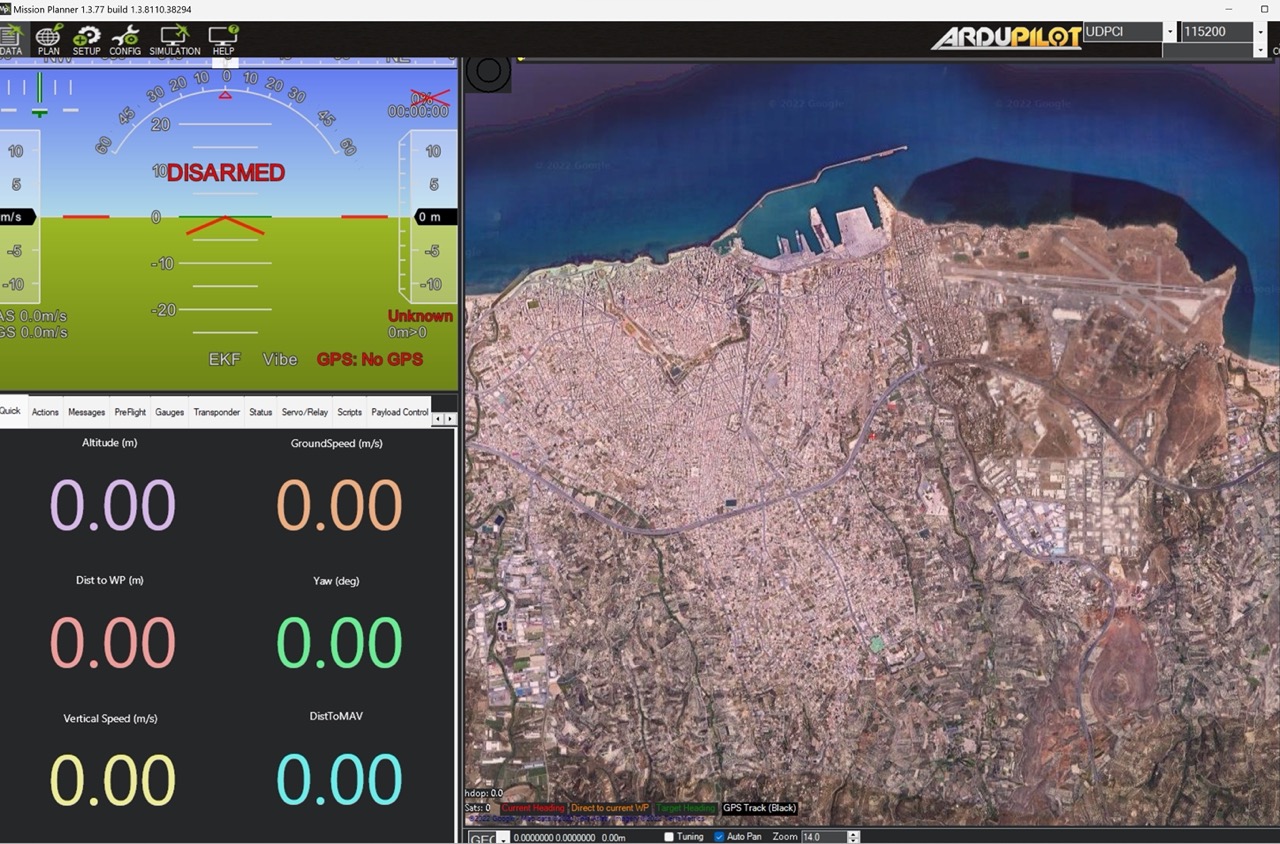
Mission planner tests
Mission planner tests with a variety of scenarios took place during the first weeks of July.
Written by: Super User
Published: 20 July 2021
Project meeting
A video conference took place on Sep 8, 2021. During the video conference, issues related to project integration were discussed.
Written by: Super User
Published: 08 September 2021
Data gathering
Visit to Achelonaris photovoltaic plant for data gathering. A large dataset consisting of both RGB and thermal images has been collected to be used for offline testing and experimentation.
Written by: Super User
Published: 17 September 2021
Autonomous flight tests
The first completely autonomous flight tests took place on Novenber 7, 2021. Various algorithms and scenarios were tested.
Written by: Super User
Published: 07 November 2021
Spraying system ready
The spraying system and its mounting on the aerial vehicle is ready.
 |
 |
Written by: Super User
Published: 17 November 2021
Third progress report delivered
The third 6-monthly project report was delivered on M18 (Nov 2021)
Written by: Super User
Published: 30 November 2021
Project meeting
A video conference took place on Dec 7, 2021. During the video conference, issues related to project integration were discussed.
Written by: Super User
Published: 07 December 2021
Data gathering
Field trials and data gathering at the photovoltaic plants "Achelonaris notio" and "Achelonaris voreio".
Written by: Super User
Published: 17 January 2022
Remote operation tests
Remote operation tests at the photovoltaic plants "Achelonaros boreio" and "Pezoules pano", both located near the village Mirtia nnd both connected to the internet via 3G/4G.
Written by: Super User
Published: 24 January 2022
Remote operation tests
Remote operation tests at the photovoltaic plant "Vitsilokomo, located near the village Klima and connected to the internet via a wifi and VDSL.
Written by: Super User
Published: 30 January 2022
Tests and fine-tuning of the spraying system
Testing and fine-tuning of the splaying system
 |
 |
Written by: Super User
Published: 09 February 2022
Connecting the photovoltaic plant with Hyperion
On Fenrruary 14-15, the fitst attempts to connect the HYPERION system with the "Achelonaris voreio" photovoltaic plant took place, according to the requiremnts of scenario 4.
Written by: Super User